深度学习-3-降低Loss下篇-Optimization
本文最后更新于:2021年7月31日 晚上
创作声明:主要为李宏毅老师的听课笔记,附视频链接:https://www.bilibili.com/video/BV1Wv411h7kN?p=11
Critical Point
Critical Point的相关概念
在做Optimization的时候,你会发现,随着你的参数不断的update,你的training的loss不会再下降,但是你对这个loss仍然不满意,你可以把deep的network,跟linear的model,或比较浅的network比较,发现说它没有做得更好,所以 deepnetwork,没有发挥它完整的力量,有时候你会甚至发现,一开始你的model就train不起来,一开始你不管怎么update你的参数,你的loss降不下来,那这个时候到底发生了什么事情呢?
过去常见的一个估计,是因为我们现在走到了一个地方,这个地方参数对loss的微分为零,当你的参数对loss微分为零的时候,gradient descent就没有办法再update参数了,这个时候training就停下来了,loss当然就不会再下降了。
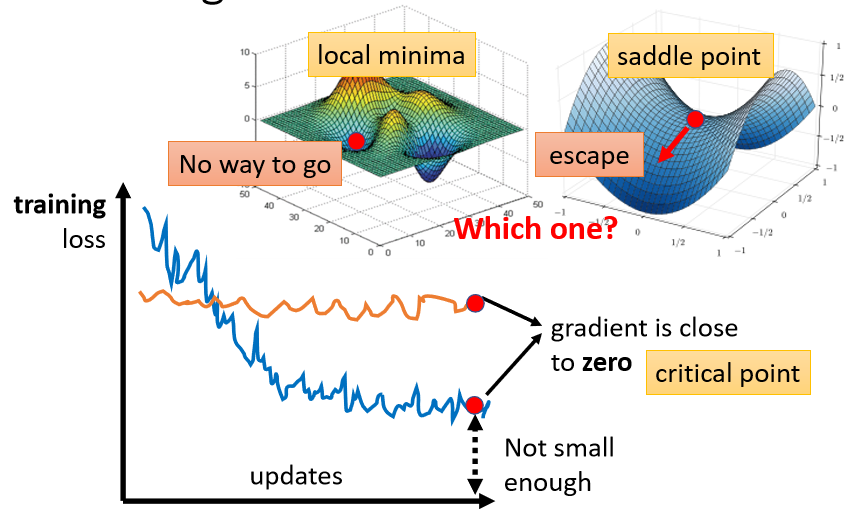
这个时候gradient为0,而且此时loss还是很高,没有发挥模型能力,显然不是global minima,那其实除了马上会想到的local minima,还有其他可能,比如说saddle point(鞍点),所谓saddle point,其实就是gradient是零,但不是local minima,也不是local maxima的地方,像在右边这个例子里面红色的这个点,它在左右这个方向是比较高的,前后这个方向是比较低的,它就像是一个马鞍的形状,所以叫做saddle point,中文就翻成鞍点。
gradient为零的点,统称为critical point(驻点),所以loss没有办法再下降,可以说是因为卡在了critical point,但不能说是卡在local minima,因为saddle point也是微分为零的点。
新的问题:gradient卡在了某个critical point,我们有没有办法知道,到底是local minima,还是saddle point?
回答这个问题很有必要,因为如果是卡在local minima,那可能就没有路可以走了,因为四周都比较高,你现在所在的位置已经是最低的点,loss最低的点了,往四周走loss都会比较高,你会不知道怎么走到其他的地方去,但如果你今天是卡在saddle point的话,saddle point旁边还是有路可以走的,还是有路可以让你的loss更低的。
区分local minima和saddle point
需要用到简单的数学知识,
判断说一个点到底是local minima,还是saddle point,需要知道我们loss function的形状,network本身很复杂,用复杂network算出来的loss function,显然也很复杂,虽然我们没有办法完整知道整个loss function的样子,但是如果给定某一组参数,比如说蓝色的这个在附近的loss function,是有办法被写出来的,它写出来如下:
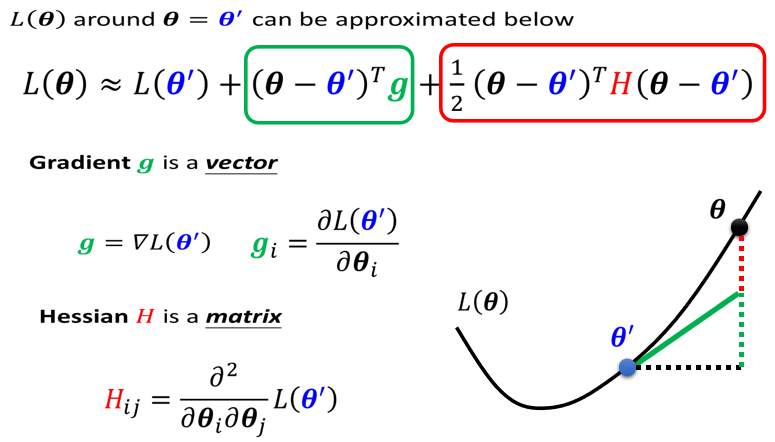
实际上是Tayler Series Approximation(泰勒级数展开)
g是一个向量,就是我们的gradient,我们用绿色的这个g来代表gradient,它的第i个component,就是θ的第i个component对L的微分。
H是一个矩阵,H里面放的是L的二次微分,它第i个row,第j个column的值,就是把θ的第i个component,对L作微分,再把θ的第j个component,对L作微分,再把θ的第i个component,对L作微分,做两次微分以后的结果就是这个$H_{ij}$
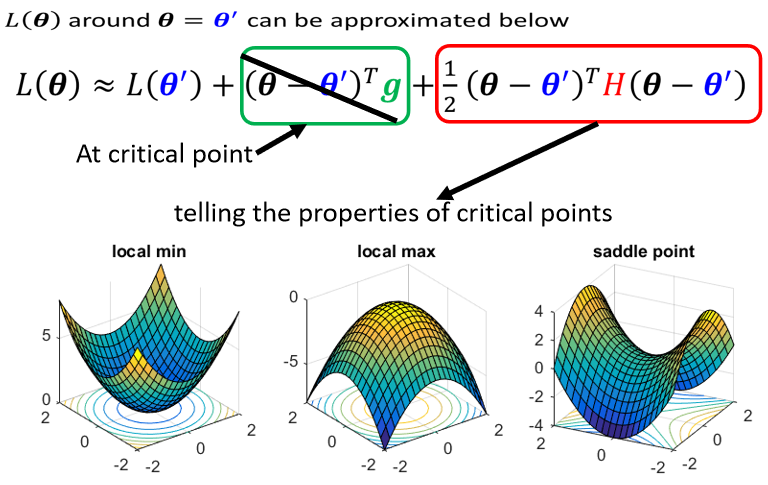
如果我们今天走到了一个critical point,意味着gradient为零,也就是绿色的这一项完全都不见了,只剩下红色的这一项,所以当在critical point的时候,这个loss function,它可以被近似为$L(\theta^{\prime})$加上红色的这一项
我们可以根据红色的这一项来判断,在$\theta^{\prime}$附近的error surface,到底长什么样子,而知道Error surface长什么样子,我就可以判断$\theta^{\prime}$是一个local minima,是一个local maxima,还是一个saddle point。
方便起见,我们把$(\theta-\theta^{\prime})$用$v$x向量来表示,判断方法如下:
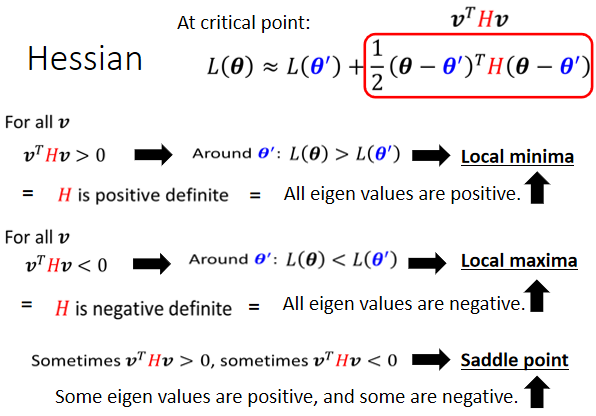
逃离saddle point
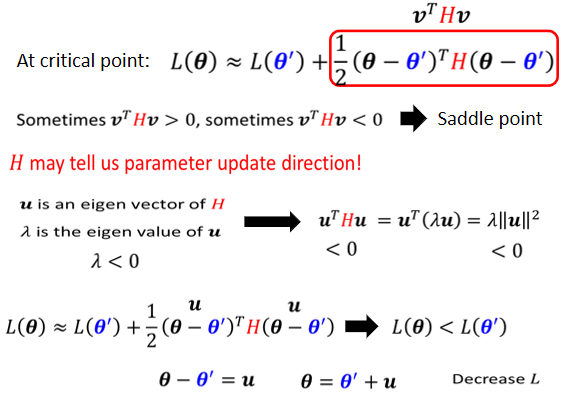
只要$(\theta-\theta^{\prime})$等于$u$,loss就会变小,所以你今天只要让$θ=u+\theta^{\prime}$,你就可以让loss变小只要沿着u,也就是eigen vector的方向,去更新你的参数去改变你的参数,你就可以让loss变小了。
所以虽然在critical point没有gradient,如果我们今天是在一个saddle point,你也不一定要惊慌,你只要找出负的eigen value,再找出它对应的eigen vector,用这个eigen vector去加$\theta^{\prime}$,就可以找到一个新的点,这个点的loss比原来还要低。
但是在实际的操作里,你几乎不会真的把Hessian算出来,这个要是二次微分,要计算这个矩阵的computation需要的运算量非常非常的大,更遑论还要把它的eigen value,跟eigen vector找出来,所以在实际的操作上,几乎没有人用这一个方法来逃离saddle point,之后的笔记会详细阐述其他有机会逃离saddle point的方法,他们的运算量都比要算这个H要小很多,这个方法是想说,如果是卡在saddle point,也许没有那么可怕,最糟的状况下你还有这一招,可以告诉你要往哪一个方向走。
从经验上看起来,其实local minima并没有那么常见,多数的时候往往是因为你卡在了一个saddle point。至于为什么,粗浅的解释是维度论,三维中封闭的东西,从四维轻松穿过,而向量的维度很多,那么是不是可以走的路就越多了呢,我们在训练一个network的时候,我们的参数往往动辄百万千万以上,所以我们的Error surface,其实是在一个非常高的维度中,我们参数有多少就代表我们的Error surface的维度有多少,参数是一千万就代表error surface,它的维度是一千万,既然维度这么高,会不会其实就有非常多的路可以走呢,那既然有非常多的路可以走,会不会其实local minima根本就很少呢,这是个尚待研究的问题。
Batch
之前说过实际上在算微分的时候,并不是真的对所有Data算出来的L作微分,而是把所有的Data分成一个一个的Batch
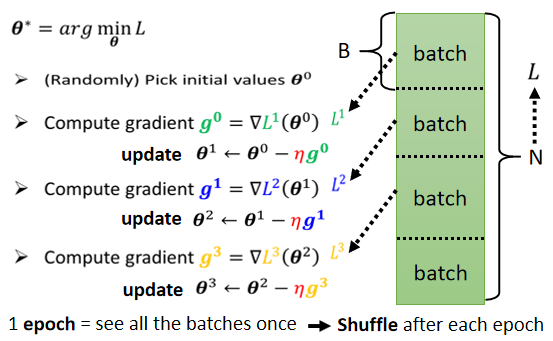
所有的Batch看过一遍,叫做一个Epoch,事实上,在做这些Batch的时候,你会做一件事情叫做Shuffle(洗牌),Shuffle有很多不同的做法,但一个常见的做法就是,在每一个Epoch开始之前,会分一次Batch,然后每一个Epoch的Batch都不一样。
回答之前的问题,为什么要用batch?
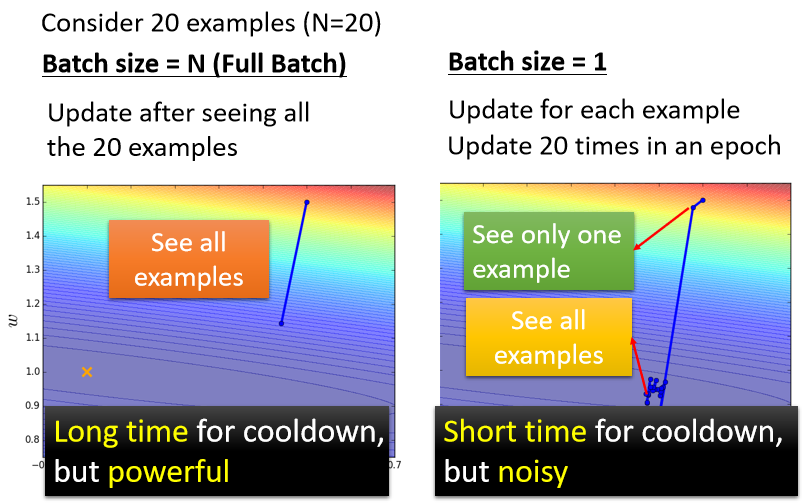
假设有20组数据,左边所有的数据都看过一遍才能够 Update 一次参数,右边所有资料看过一遍,你已经更新了20次的参数,但是左边这样子的方法有一个优点,就是它这一步走的是稳的,那右边这个方法它的缺点,就是它每一步走的是不稳的。
看起来左边的方法跟右边的方法,他们各自都有擅长跟不擅长的东西,左边是蓄力时间长,但是威力比较大,右边技能冷却时间短,但是它是比较不准的,看起来各自有各自的优缺点,但是你会觉得说,左边的方法技能冷却时间长,右边的方法技能冷却时间短,那只是你没有考虑并行运算的问题。
Larger batch size does not require longer time to compute gradient
事实上,比较大的Batch Size,你要算Loss,再进而算Gradient,所需要的时间,不一定比小的Batch Size要花的时间长。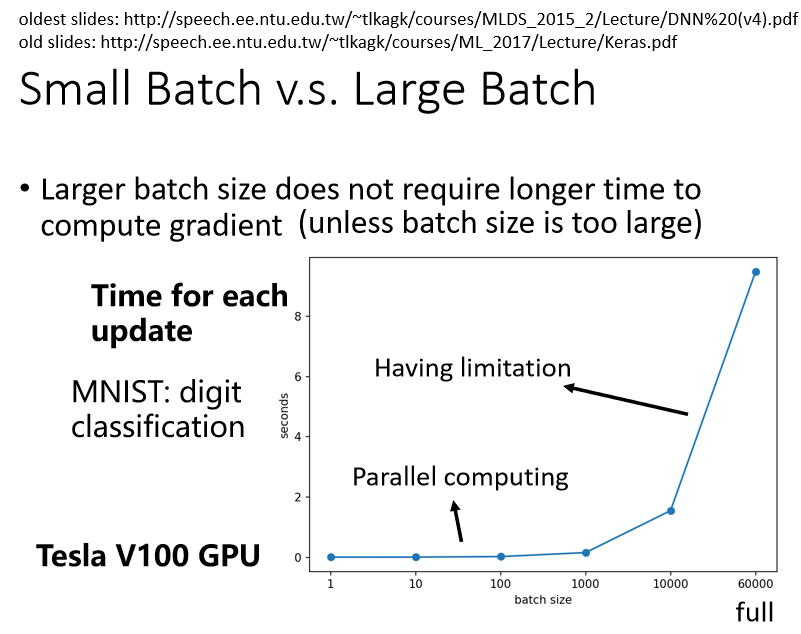
这边我们就是做了一个实验,我们想要知道说,给机器一个Batch,它要计算出Gradient,进而Update参数,到底需要花多少的时间。
这边列出了Batch Size等于1等于10,等于100等于1000所需要耗费的时间。
你会发现Batch Size从1到1000,需要耗费的时间几乎是一样的,你可能直觉上认为有1000组数据,那需要计算Loss,然后计算Gradient,花的时间不会是一组数据的1000倍吗,但是实际上并不是这样的
因为在实际上做运算的时候,我们有GPU,可以做并行运算,是因为你可以做并行计算的关系,这1000组数据是平行处理的,所以1000组数据所花的时间,并不是一组数据的1000倍,当然GPU并行计算的能力还是有它的极限,当你的Batch Size真的非常非常巨大的时候,GPU在跑完一个Batch,计算出Gradient所花费的时间,还是会随着Batch Size的增加,而逐渐增长。
所以如果Batch Size是从1到1000,所需要的时间几乎是一样的,但是当你的Batch Size增加到10000,乃至增加到60000的时候,你就会发现GPU要算完一个Batch,把这个Batch里面的资料都拿出来算Loss,再进而算Gradient,所要耗费的时间,确实有随着Batch Size的增加而逐渐增长,但你会发现这边用的是V100,所以它挺厉害的,给它60000组数据,一个Batch里面,塞了60000组数据,它在10秒钟之内也把Gradient就算出来了。
Smaller batch requires longer time for one epoch
GPU虽然有并行计算的能力,但它并行计算能力终究是有个极限,所以你Batch Size真的很大的时候,时间还是会增加的,但是因为有并行计算的能力,因此实际上,当你的Batch Size小的时候,你要跑完一个Epoch,花的时间是比大的Batch Size还要多的。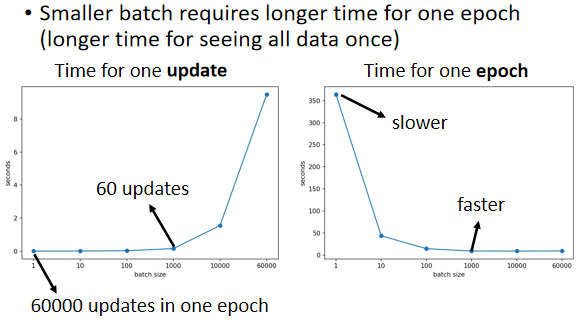
假设我们的训练数据只有6000组,那Batch Size设1,那你要60000个Update才能跑完一个Epoch,如果今天是Batch Size等于1000,你要60个Update才能跑完一个Epoch,而一个Batch Size等于1000和Batch Size等于1算Gradient的时间根本差不多,那60000次Update,跟60次Update比起来,它的时间的差距量就非常可观了。
在没有考虑并行计算的时候,你觉得大的Batch比较慢,但实际上,在有考虑并行计算的时候,一个Epoch大的Batch花的时间反而是比较少的。
那这样看起来大的Batch应该比较好?
大的BatchUpdate比较稳定,小的Batch,它的Gradient的方向比较Noisy,那这样看起来,大的Batch应该比较好,小的Batch应该比较差,因为现在大的Batch的劣势已经因为并行计算被拿掉了,它好像只剩下优势而已。
但神奇的地方是Noisy的Gradient,反而可以帮助Training,这个也是跟直觉正好相反的,大的Batch Size,往往在Training的时候,会给你带来比较差的结果,这个实际是Optimization的问题,当你用大的Batch Size的时候,你的Optimization可能会有问题,小的Batch Size,Optimization的结果反而是比较好的,为什么会这样子呢?
“Noisy” update is better for training
一个可能的解释是这样子的:
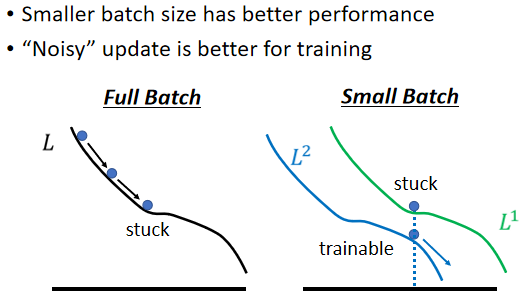
假设你是Full Batch,那你今天在Update你的参数的时候,你就是沿着一个Loss Function来Update参数,今天Update参数的时候走到一个Local Minima,走到一个Saddle Point,显然就停下来了,Gradient是零,如果你不特别去看Hession的话,那你用Gradient Descent的方法,你就没有办法再更新你的参数了,但是假如是Small Batch的话,因为我们每次是挑一个Batch出来,算它的Loss,Loss Function 定义不会变,但会因为数据的不同产生的 Error surface,你选到第一个Batch的时候,你是用L1来算你的Gradient,你选到第二个Batch的时候,你是用L2来算你的Gradient,假设你用L1算Gradient的时候,发现Gradient是零,卡住了,但L2跟L1又不一样,L2就不一定会卡住,所以L1卡住了没关系,换下一个Batch来,L2再算Gradient,所以今天这种Noisy的Update的方式,结果反而对Training,其实是有帮助的。
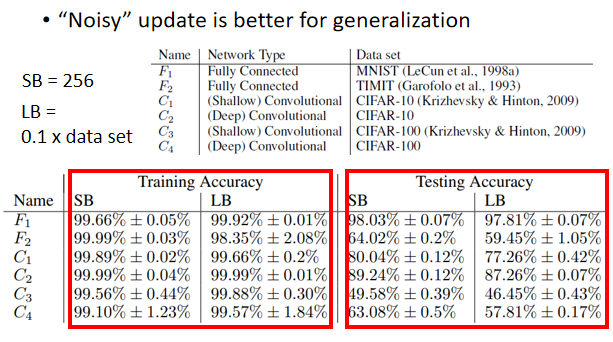
“Noisy” update is better for generalization
小的 Batch 也对 Testing 有帮助,这个实验结果是引用自On Large-Batch Training For Deep Learning,Generalization Gap And Sharp Minima,
一个解释如图:

假设这个是我们的Training Loss,在这个Training Loss上面可能有很多个Local Minima,有不只一个Local Minima,那这些Local Minima它们的Loss都很低,它们Loss可能都趋近于0,但是这个Local Minima,还是有好Minima跟坏Minima之分。
如果一个Local Minima它在一个峡谷里面,它是坏的Minima,然后它在一个平原上,它是好的Minima,为什么会有这样的差异呢?
假设现在Training跟Testing中间,有一个Mismatch,Training的Loss跟Testing的Loss,它们那个Function不一样,有可能是本来你Training跟Testing的Distribution(分布) 就不一样。
那也有可能是因为Training跟Testing,你都是从Sample的Data算出来的,也许Training跟Testing,Sample到的Data不一样,那所以它们算出来的Loss,当然是有一点差距。
那我们就假设说这个Training跟Testing,它的差距就是把Training的Loss,这个Function往右平移一点,这时候你会发现,对左边这个在一个盆地里面的Minima来说,它的在Training跟Testing上面的结果,不会差太多,只差了一点点,但是对右边这个在峡谷里面的Minima来说,一差就可以天差地远。
它在这个Training Set上,算出来的Loss很低,但是因为Training跟Testing之间的不一样,所以Testing的时候,这个Error Surface一变,它算出来的Loss就变得很大,而很多人相信这个大的Batch Size,会让我们倾向于走到峡谷里面,而小的Batch Size,倾向于让我们走到盆地里面
他直觉上的想法是这样,就是小的Batch,它有很多的Loss,它每次Update的方向都不太一样,所以如果今天这个峡谷非常地窄,它可能一个不小心就跳出去了,因为每次Update的方向都不太一样,它的Update的方向也就随机性,所以一个很小的峡谷,没有办法困住小的Batch。
如果峡谷很小,它可能动一下就跳出去,之后停下来如果有一个非常宽的盆地,它才会停下来,那对于大的Batch Size,反正它就是顺着规定Update,然后它就很有可能,走到一个比较小的峡谷里面
但这只是一个解释,那也不是每个人都相信这个解释,那这个其实还是一个尚待研究的问题。
总结
在有平行运算的情况下,小的Batch跟大的Batch,其实运算的时间并没有太大的差距,除非你的大的Batch那个大是真的非常大,才会显示出差距来。但是一个Epoch需要的时间,小的Batch比较长,大的Batch反而是比较快的,所以从一个Epoch需要的时间来看,大的Batch其实是占到优势的。
而小的Batch,你会Update的方向比较Noisy,大的Batch Update的方向比较稳定,但是Noisy的Update的方向,反而在Optimization的时候会占到优势,而且在Testing的时候也会占到优势,所以大的Batch跟小的Batch,它们各自有它们擅长的地方。
所以Batch Size,变成另外一个你需要去调整的Hyperparameter。
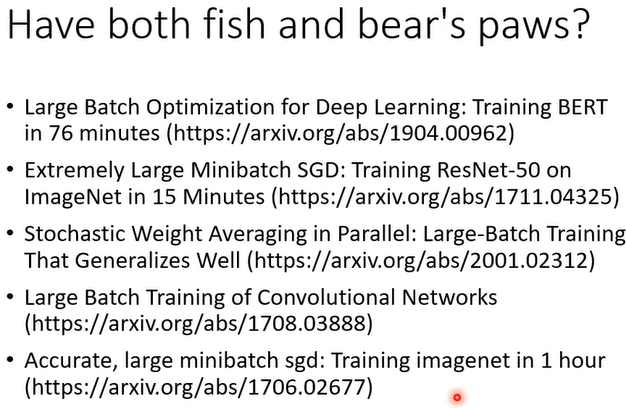
那我们能不能够鱼与熊掌兼得呢,我们能不能够截取大的Batch的优点,跟小的Batch的优点,我们用大的Batch Size来做训练,用平行运算的能力来增加训练的效率,但是训练出来的结果同时又得到好的结果呢,又得到好的训练结果呢。
Momentum
Momentum(动量),这是另外一个,有可能可以对抗Saddle Point或Local Minima的技术,Momentum的运作如图:
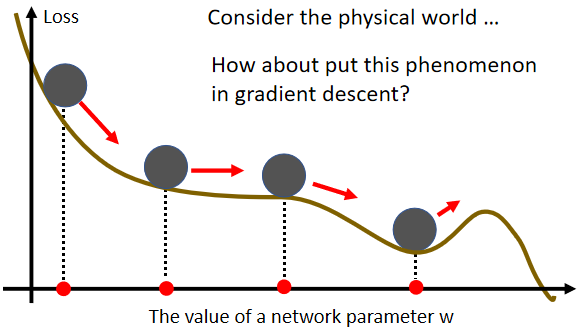
它的概念,可以想像成在物理的世界里面,假设Error Surface就是真正的斜坡,而我们的参数是一个球,你把球从斜坡上滚下来,如果今天是Gradient Descent,它走到Local Minima就停住了,走到Saddle Point就停住了,但是在物理的世界里,一个球如果从高处滚下来,从高处滚下来就算滚到Saddle Point,如果有惯性,它从左边滚下来,因为惯性的关系它还是会继续往右走,甚至它走到一个Local Minima,如果今天它的动量够大的话,它还是会继续往右走,甚至翻过这个小坡然后继续往右走
那所以今天在物理的世界里面,一个球从高处滚下来的时候,它并不会被Saddle Point,或Local Minima卡住,不一定会被Saddle Point,或Local Minima卡住,我们有没有办法运用这样子的概念,到Gradient Descent里面呢,这个就是Momentum技术。
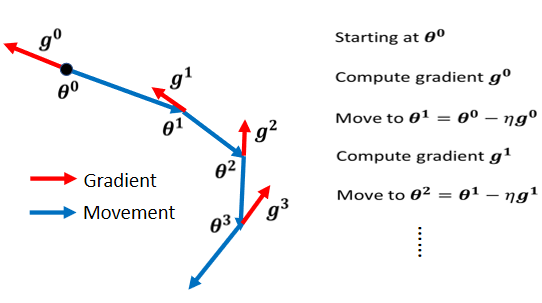
Vanilla Gradient Descent
Vanilla Gradient Descent(一般梯度下降) 如图:
Gradient Descent + Momentum
加上Momentum以后,每一次我们在移动我们的参数的时候,我们不是只往Gradient Descent,我们不是只往Gradient的反方向来移动参数,而是Gradient的反方向,加上前一步移动的方向,两者加起来的结果,去调整参数,如图:
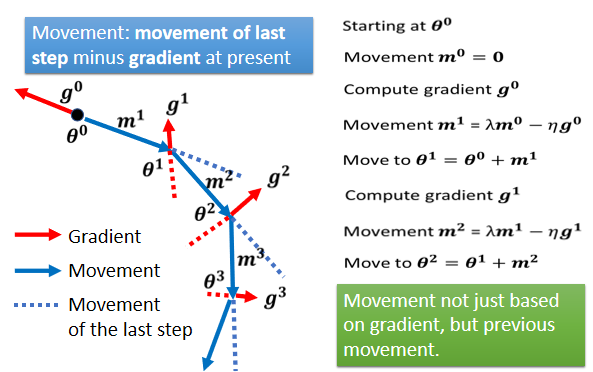
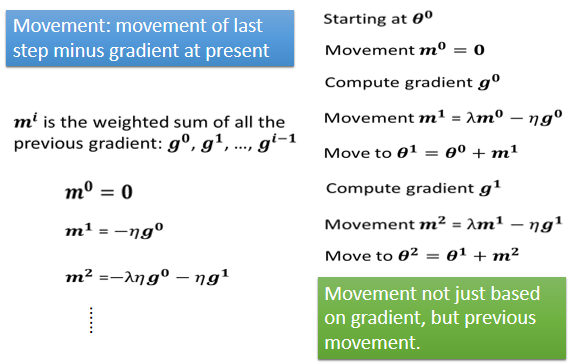
所谓的Momentum,当加上Momentum的时候,我们Update的方向,不是只考虑现在的Gradient,而是考虑过去所有Gradient的总和。
Adaptive Learning Rate
问题
critical point其实不一定是在训练一个Network的时候会遇到的最大的障碍,此话怎讲?
我们在训练一个network的时候,会把它的loss记录下来,所以会看到loss原来很大,随着你参数不断的update,横轴代表参数update的次数,随着你参数不断的update,这个loss会越来越小,最后就卡住了,你的loss不再下降。
多数这个时候,就会猜测是不是走到了critical point,因为gradient等于零的关系,所以我们没有办法再更新参数。当我们说走到critical point的时候,意味着gradient非常的小,但是你有确认过,当你的loss不再下降的时候,gradient真的很小吗?其实很多人可能并没有确认过这件事,而事实上在下面这个例子里面,当我们的loss不再下降的时候,gradient并没有真的变得很小。
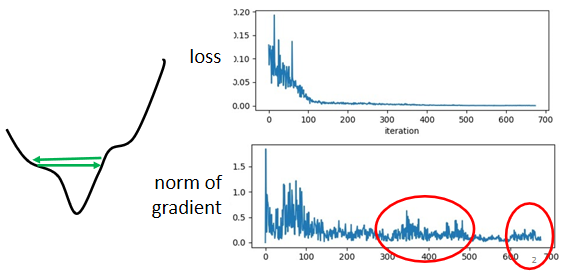
gradient是一个向量,下面是gradient的norm,即gradient这个向量的长度,随着参数更新的时候的变化,你会发现虽然loss不再下降,但是这个gradient的norm,gradient的大小并没有真的变得很小
这样的结果其实也不难估计,也许你遇到的是这样子的状况:
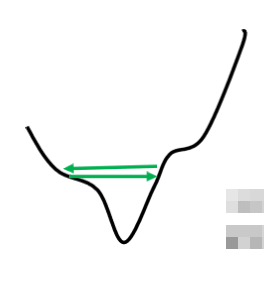
这个是我们的error surface,然后你现在的gradient,在error surface山谷的两个谷壁间,不断的来回的震荡,这个时候你的loss不会再下降,所以你会觉得它真的卡到了critical point,卡到了saddle point,卡到了local minima吗?不是的,它的gradient仍然很大,只是loss不再减小了。
举一个非常简单的例子,这边有一个非常简单的error surface:
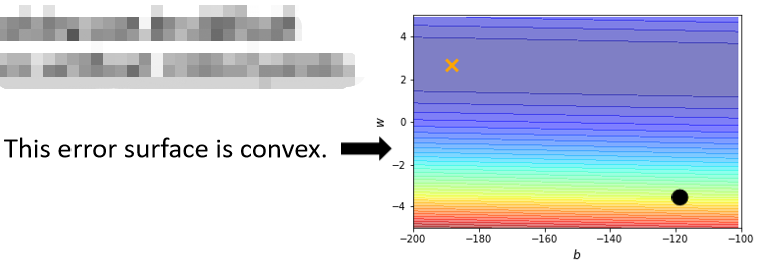
我们只有两个参数,这两个参数值不一样的时候,Loss的值不一样,我们就画出了一个error surface,这个error surface的最低点在黄色X这个地方,事实上,这个error surface是convex(凸面的) 的形状,convex optimization(凸优化)。
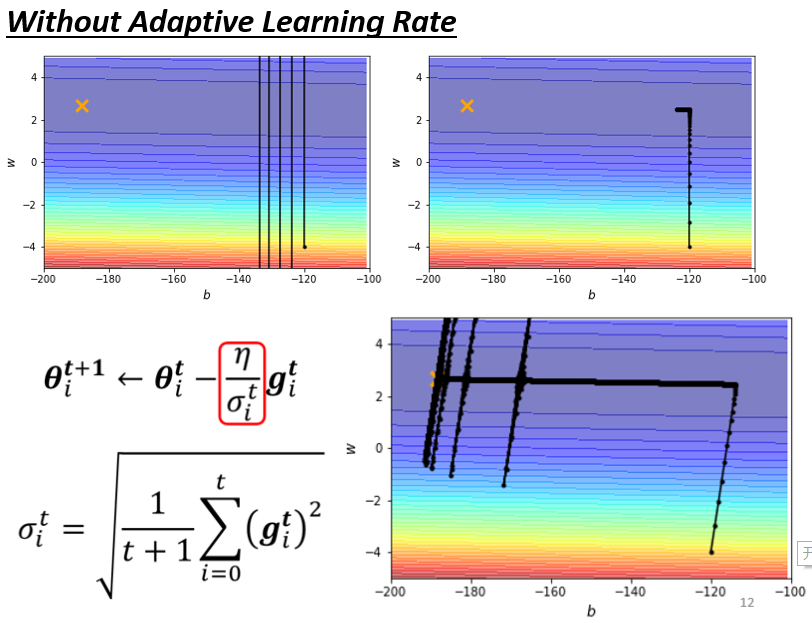
它的这个等高线是椭圆形的,只是它在横轴的地方,它的gradient非常的小,它的坡度的变化非常的小,非常的平滑,所以这个椭圆的长轴非常的长,短轴相对之下比较短,在纵轴的地方gradient的变化很大,error surface的坡度非常的陡峭,我们把黑点当作初始的点,然后来做gradient descend
你可能觉得这个convex的error surface,做gradient descend,有什么难的吗?不就是一路滑下来,然后再走过去吗,应该是非常容易。你实际上自己试一下,你会发现说,就连这种convex的error surface,形状这么简单的error surface,你用gradient descend,都不见得能把它做好,举例来说这个是实际的结果:
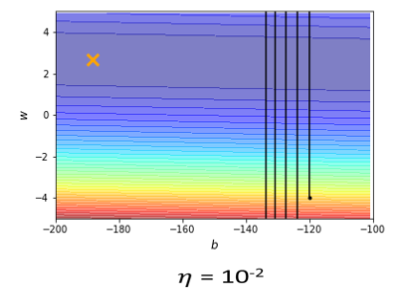
learning rate设10⁻²的时候,参数在山壁的两端不断的震荡,loss掉不下去,但是gradient其实仍然是很大的。
可能是因为你learning rate设太大了,learning rate决定了我们update参数的时候步伐有多大,learning rate显然步伐太大,你没有办法慢慢地滑到山谷里面,是不是只要把learning rate设小一点,就可以解决这个问题了。
事实不然,试着调整这个learning rate就会发现,仅仅要train这种convex的optimization的问题,就会很麻烦,调这个learning rate,从10⁻²一直调到10⁻⁷,调到10⁻⁷以后,终于不再震荡了。
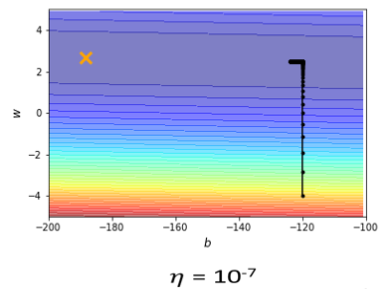
终于从这个地方滑到山低谷终于左转,但是会发现这个训练永远走不到终点,因为learning rate已经太小了,竖直往上这一段这个很斜的地方,因为这个坡度很陡,gradient的值很大,所以还能够前进一点,左拐以后这个地方坡度已经非常的平滑了,这么小的learning rate,根本没有办法再让我们的训练前进。
我们需要更好的gradient descend的版本,在之前我们的gradient descend里面,所有的参数都是设同样的learning rate,这显然是不够的,learning rate它应该要为每一个参数客制化。
客制化
其实我们可以看到一个大原则,如果在某一个方向上,gradient的值很小,非常的平坦,那我们会希望learning rate调大一点,如果在某一个方向上,gradient的值很小,非常的陡峭,那我们其实期待learning rate可以设得小一点。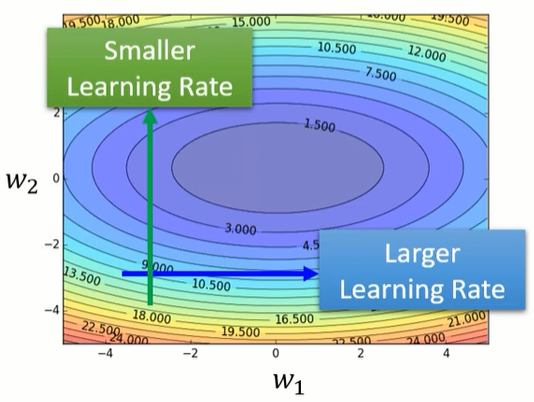
我们要改一下gradient descend原来的式子,我们只放某一个参数update的式子,我们之前在讲gradient descend,我们往往是讲所有参数update的式子,为了简化这个问题,我们只看一个参数,但是你完全可以把这个方法,推广到所有参数的状况。
$\theta_i^{t}$,在第t次迭代时第i个参数。
$g_i^{t}$代表θ等于θᵗ的时候,参数θᵢ对loss的微分,我们把这个θᵢᵗ减掉learning rate乘gᵢᵗ会得到θᵢᵗ⁺¹,这是我们原来的gradient descend,我们的learning rate是固定的。
现在我们要有一个随着参数客制化的learning rate,我们把原来learning rate这一项呢,改写成
$\frac{\eta}{\sigma_i^{t}}$,$\sigma_i^{t}$有一个上标t,有一个下标i,这代表说这个σ这个参数,首先它是depend on i的,不同的参数我们要给它不同的σ,同时它也是iteration dependent的,不同的iteration我们也会有不同的σ,此时我们就有一个parameter dependent的learning rate。
最后公式如下:
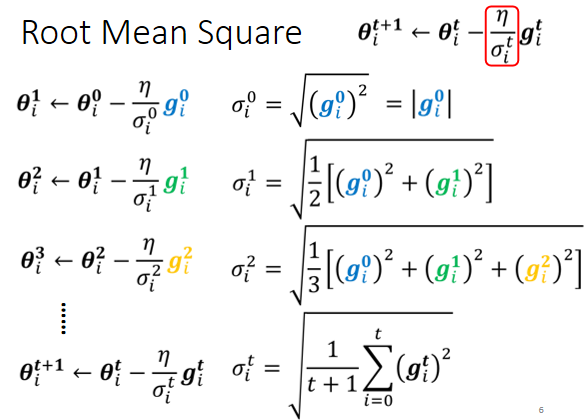
$\theta_i^{t+1}\gets \theta_i^{t}-\frac{\eta}{\sigma_i^{t}}g_i^{t}$
Adagrad
计算σ一个常见的类型是算gradient的Root Mean Square
这一招被用在一个叫做Adagrad的方法里面,为什么它可以做到我们刚才讲的,坡度比较大的时候,learning rate就减小,坡度比较小的时候,learning rate就放大呢?
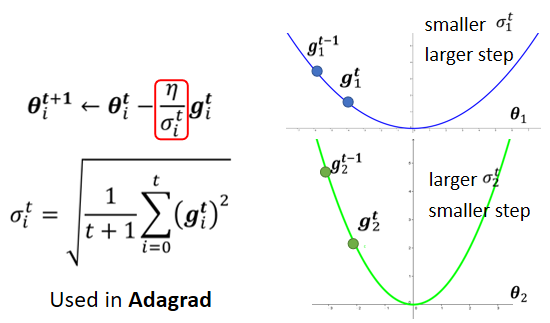
我们可以想像说,现在我们有两个参数:θᵢ¹和θᵢ²,θᵢ¹坡度小,θᵢ²坡度大,θᵢ¹因为它坡度小,所以你在θᵢ¹这个参数上面,算出来的gradient值都比较小,因为gradient算出来的值比较小,然后这个σ是gradient的平方和取平均再开根号,所以算出来的σ就小,所以learning rate就大,同理,θᵢ²会导致learning rate小。
但这种方法不能解决的是同一参数随时间变化的learning rate需求,他只是对每个参数做了不同的learning rate调整,但同一参数的gradient就会固定是差不多的值。
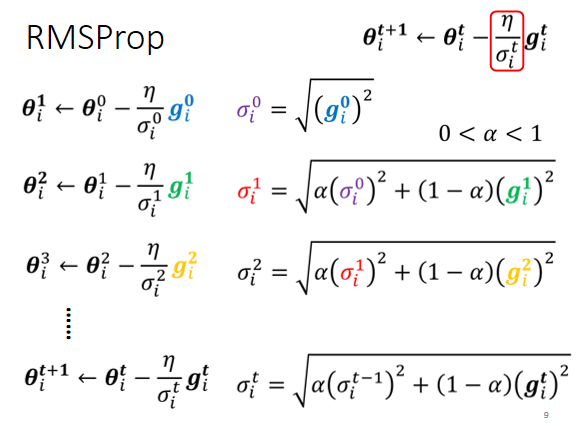
RMS Prop
RMS Prop这个方法,它的第一步跟Adagrad的方法,是一模一样的,但是它存有一个α,就像learning rate一样,这个你要自己调它,它是一个hyperparameter。
- α设很小趋近于0,就代表我觉得gᵢ¹相较于之前所算出来的gradient而言,比较重要。
- α设很大趋近于1,那就代表我觉得现在算出来的gᵢ¹比较不重要,之前算出来的gradient比较重要。
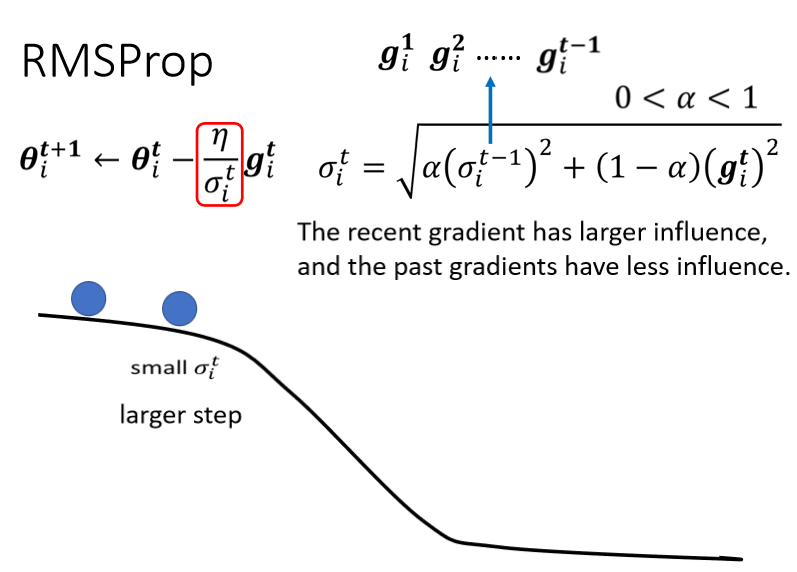
你用α来决定现在刚算出来的gᵢᵗ它有多重要,这个就是RMS Prop。他可以解决动态问题。
我们现在假设从这个地方开始:
这个黑线是我们的error surface,从这个地方开始你要update参数,好你这个球就从这边走到这边,那因为一路上都很平坦,很平坦就代表说g算出来很小,代表现在update参数的时候,我们会走比较大的步伐。
接下来继续滚,滚到这边以后我们gradient变大了,如果不是RMS Prop,原来的Adagrad的话它反应很慢,但如果你用RMS Prop,把α设小一点,让新的gradient影响比较大的话,那你就可以很快的让σ的值变大,于是可以很快的让你的步伐变小。
本来很平滑走到这个地方,突然变得很陡,那RMS Prop可以很快的踩一个刹车,把learning rate变小,如果你没有踩刹车的话,你走到这里这个地方,learning rate太大了,那gradient又很大,两个很大的东西乘起来,你可能就很快就飞出去了,飞到很远的地方。
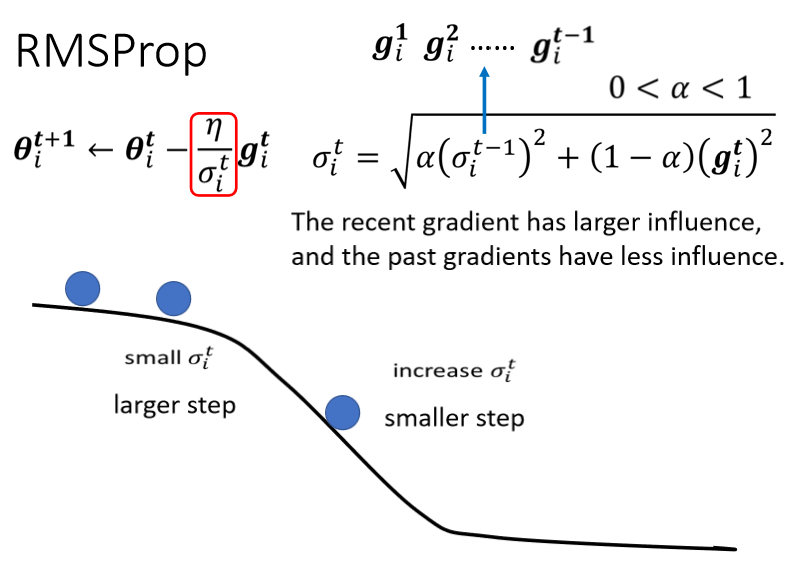
如果继续走,又走到平滑的地方了,因为这个σᵢᵗ你可以调整α,让它比较看重于最近算出来的gradient,所以你gradient一变小,σ可能就反应很快,它的这个值就变小了,然后你走的步伐就变大了。
Adam
实际上如今最常用的optimization的策略是Adam。
Adam就是RMS Prop加上Momentum,Adam的演算法跟原始的论文在这里
实际上adam在今天的pytorch里面已经集成,所以不用担心这种optimization的问题,optimizer这个deep learning的套件,往往都帮你做好了,然后optimizer里面,也有一些参数需要调,也有一些hyperparameter,需要人工决定,但是你往往用预设的,那一种参数就够好了,你自己调有时候会调到比较差的,往往直接复制pytorch里面Adam这个optimizer,然后预设的参数不要随便调,就可以得到不错的结果了,关于Adam的细节,如有兴趣,大家可以自己研究。
Learning Rate Scheduling
采用原始的adagrad,我们会得到如下:
这个走下来没有问题,然后接下来在左转的时候,这边也是update了十万次,之前update了十万次,只卡在左转这个地方,现在有Adagrad以后,你可以再继续走到非常接近终点的位置,因为当你走到这个地方的时候,你因为这个左右的方向的,这个gradient很小,所以learning rate会自动调整,左右这个方向的,learning rate会自动变大,所以你这个步伐就可以变大,就可以不断的前进。
接下来的问题就是,为什么快走到终点的时候突然爆炸了呢?
我们在做这个σ的时候,我们是把过去所有看到的gradient,都拿来作平均
所以这个纵轴的方向,在这个初始的这个地方,gradient很大
可是这边走了很长一段路以后,这个纵轴的方向,gradient算出来都很小,所以纵轴这个方向,这个y轴的方向σ变小,小到一个地步以后,这个step就变很大,然后就爆炸了,爆炸以后没关系,有办法修正回来,因为出去以后,就走到了这个gradient比较大的地方,走到gradient比较大的地方以后,这个σ又慢慢的变大,σ慢慢变大以后,这个参数Update的步伐大小就慢慢的变小。
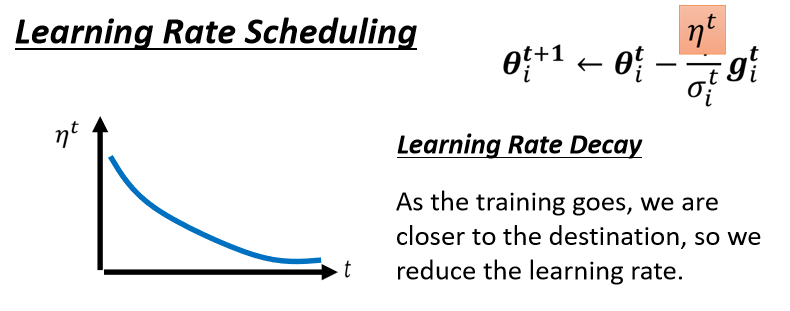
有一个方法可以解决这个问题,这个叫做learning rate scheduling(学习率调度)
我们刚才这边还有一项η,这个η是一个固定的值,learning rate scheduling的意思就是说,我们不要把η当一个常数,我们把它跟时间有关
- 最常见的策略叫做Learning Rate Decay(学习率衰减),也就是说,随着时间的不断地进行,随着参数不断的update,我们这个η让它越来越小。
这个就合理了,因为一开始我们距离终点很远,随着参数不断update,我们距离终点越来越近,所以我们把learning rate减小,让我们参数的更新踩了一个刹车,让我们参数的更新能够慢慢地慢下来,所以刚才那个状况,如果加上Learning Rate Decay有办法解决。
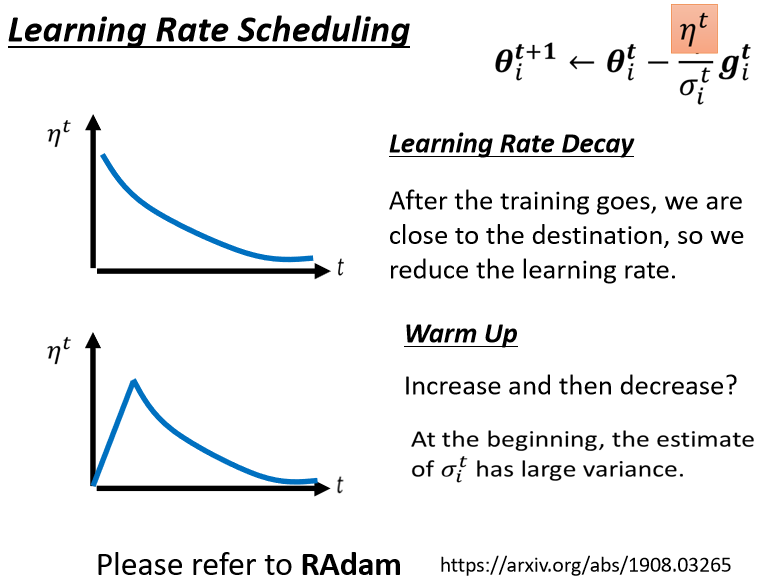
- 另外一个经典,常用的Learning Rate Scheduling的方式,叫做Warm Up(热身),Warm Up的方法是让learning rate,要先变大后变小,你会问说变大要变到多大呢,变大速度要多快呢,变小速度要多快呢,这个也是hyperparameter,要自己用手调的,但是大方向的大策略就是,learning rate要先变大后变小,这个黑科技出现在很多远古时代(2015)的论文里面,总之会让训练效果变得更好。
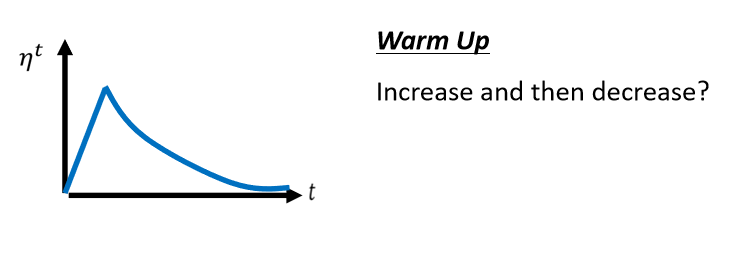
那为什么需要warm Up呢,这个仍然是今天可以研究的问题。
一个可能的解释是说,我们在用Adam,RMS Prop或Adagrad的时候,我们会需要计算σ,它是一个统计的结果,σ告诉我们,某一个方向它到底有多陡,或者是多平滑,那这个统计的结果,要看走狗i数据以后,这个统计才精准,所以一开始我们的统计是不精准的。
一开始我们的σ是不精准的,所以我们一开始不要让我们的参数,离初始的地方太远,先让它在初始的地方呢,做一些探索,所以一开始learning rate比较小,是让它探索收集一些有关error surface的情报,先收集有关σ的统计数据,等σ统计得比较精准以后,再让learning rate慢慢地爬升。
这是一个解释为什么我们需要warm up的可能性,如果你想要了解更多有关warm up的东西的话,可以看一篇paper,它是Adam的进阶版叫做RAdam,里面对warm up这件事情有更多的理解。
Summary of Optimization
从最原始的gradient descent进化到这一个版本:
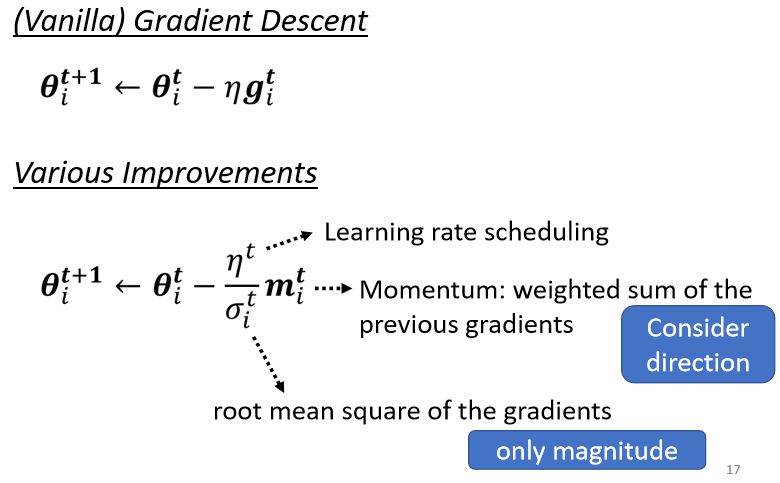
这个最终的版本里面有:
- Momentum,Update的方向,不是只考虑现在的Gradient,而是考虑过去所有Gradient的总和,
针对Saddle Point或Local Minima的技术。 - Root Mean Square,动态控制update的步伐,平原峭壁任我行。
- Learning rate scheduling,宏观把控步伐的调整。
到目前为止,我们说的是当我们的error surface非常的崎岖,就像这个例子一样非常的崎岖的时候
我们用一些比较好的方法,来做optimization,前面有一座山挡着,我们希望可以绕过那座山,山不转路转。
有没有可能,直接把这个error surface移平,我们改Network里面的什么东西,改Network的架构activation function,或者是其它的东西,直接移平error surface,让它变得比较好train,也就是山挡在前面,就把山直接铲平的意思。
本文尚待回答的问题(后续文章更新)
- 如何“移山”
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 协议 ,转载请注明出处!